#include <contactsurfacebody.hpp>
Public Types | |
| using | embedded_plugin_t = GenericConnectionBodyPlugin< Cell, ContactSurface > |
Protected Attributes | |
| Vec | position = Vec::zero() |
| Vec | prevposition = Vec::zero() |
| Vec | velocity = Vec::zero() |
| Vec | force = Vec::zero() |
| bool | movementEnabled = true |
| double | mass = Config::DEFAULT_CELL_MASS |
| double | totalForce = 0 |
| Vec | angularVelocity = Vec::zero() |
| Vec | torque = Vec::zero() |
| Basis< Vec > | orientation |
| Rotation< Vec > | orientationRotation |
Private Attributes | |
| Cell * | cell = nullptr |
| std::vector< ContactSurface< Cell > * > | cellConnections |
| double | incompressibility = 0.01 |
| double | membraneStiffness = 0.5 |
| double | restRadius = 40 |
| double | dynamicRadius = restRadius |
| radiius of the cell when at rest More... | |
| double | prevDynamicRadius = dynamicRadius |
| double | currentArea = 4.0 * M_PI * restRadius * restRadius |
| double | restVolume = (4.0 * M_PI / 3.0) * restRadius * restRadius |
| double | currentVolume = restVolume |
| double | pressure = 0 |
| bool | volumeConservationEnabled = true |
Static Private Attributes | |
| static constexpr double | MAX_DYN_RADIUS_RATIO = 2.0 |
Friends | |
| struct | GenericConnectionBodyPlugin< Cell, ContactSurface > |
Detailed Description
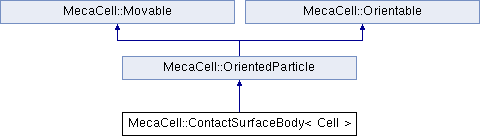
class MecaCell::ContactSurfaceBody< Cell >
Definition at line 16 of file contactsurfacebody.hpp.
Member Typedef Documentation
◆ embedded_plugin_t
| using MecaCell::ContactSurfaceBody< Cell >::embedded_plugin_t = GenericConnectionBodyPlugin<Cell, ContactSurface> |
Definition at line 38 of file contactsurfacebody.hpp.
Constructor & Destructor Documentation
◆ ContactSurfaceBody()
|
inline |
Definition at line 40 of file contactsurfacebody.hpp.
Member Function Documentation
◆ computeCurrentAreaAndVolume()
|
inline |
Definition at line 72 of file contactsurfacebody.hpp.
◆ computeRestVolume()
|
inline |
Definition at line 139 of file contactsurfacebody.hpp.
◆ disableMovement()
|
inlineinherited |
◆ enableMovement()
◆ getAngularVelocity()
|
inlineinherited |
Definition at line 21 of file orientable.h.
◆ getBoundingBoxRadius()
|
inline |
Definition at line 51 of file contactsurfacebody.hpp.
◆ getConnectedCell()
|
inline |
Definition at line 132 of file contactsurfacebody.hpp.
◆ getConnectedCellAndMembraneDistance()
|
inline |
Definition at line 52 of file contactsurfacebody.hpp.
◆ getDynamicRadius()
|
inline |
Definition at line 50 of file contactsurfacebody.hpp.
◆ getForce()
◆ getMass()
|
inlineinherited |
◆ getMomentOfInertia()
|
inline |
Definition at line 146 of file contactsurfacebody.hpp.
◆ getOrientation()
Definition at line 23 of file orientable.h.
◆ getOrientationRotation()
Definition at line 24 of file orientable.h.
◆ getPosition()
|
inlineinherited |
◆ getPreciseMembraneDistance()
|
inline |
Definition at line 135 of file contactsurfacebody.hpp.
◆ getPressure()
|
inline |
Definition at line 154 of file contactsurfacebody.hpp.
◆ getPrevposition()
|
inlineinherited |
◆ getRadius()
|
inline |
Definition at line 155 of file contactsurfacebody.hpp.
◆ getRestArea()
|
inline |
Definition at line 138 of file contactsurfacebody.hpp.
◆ getRestMomentOfInertia()
|
inline |
Definition at line 142 of file contactsurfacebody.hpp.
◆ getTorque()
|
inlineinherited |
Definition at line 22 of file orientable.h.
◆ getVelocity()
|
inlineinherited |
◆ getVolume()
|
inline |
Definition at line 149 of file contactsurfacebody.hpp.
◆ getVolumeVariation()
|
inline |
Definition at line 147 of file contactsurfacebody.hpp.
◆ isMovementEnabled()
|
inlineinherited |
◆ moveTo()
|
inline |
Definition at line 156 of file contactsurfacebody.hpp.
◆ receiveForce() [1/2]
|
inlineinherited |
◆ receiveForce() [2/2]
|
inlineinherited |
◆ receiveTorque()
|
inlineinherited |
Definition at line 32 of file orientable.h.
◆ releaseAdhesions()
|
inline |
Definition at line 128 of file contactsurfacebody.hpp.
◆ resetAngularVelocity()
|
inlineinherited |
Definition at line 35 of file orientable.h.
◆ resetForce()
◆ resetTorque()
|
inlineinherited |
Definition at line 34 of file orientable.h.
◆ resetVelocity()
◆ setAngularVelocity()
|
inlineinherited |
Definition at line 25 of file orientable.h.
◆ setDynamicRadius()
|
inline |
Definition at line 153 of file contactsurfacebody.hpp.
◆ setForce()
|
inlineinherited |
◆ setIncompressibility()
|
inline |
Definition at line 151 of file contactsurfacebody.hpp.
◆ setMass()
|
inlineinherited |
◆ setOrientationRotation()
Definition at line 27 of file orientable.h.
◆ setPosition()
|
inlineinherited |
◆ setPrevposition()
|
inlineinherited |
◆ setRadius()
|
inline |
Definition at line 49 of file contactsurfacebody.hpp.
◆ setRestVolume()
|
inline |
Definition at line 48 of file contactsurfacebody.hpp.
◆ setStiffness()
|
inline |
Definition at line 152 of file contactsurfacebody.hpp.
◆ setTorque()
|
inlineinherited |
Definition at line 26 of file orientable.h.
◆ setVelocity()
|
inlineinherited |
◆ setVolumeConservationEnabled()
|
inline |
Definition at line 47 of file contactsurfacebody.hpp.
◆ solidifyAdhesions()
|
inline |
Definition at line 125 of file contactsurfacebody.hpp.
◆ updateCurrentOrientation()
|
inlineinherited |
Definition at line 33 of file orientable.h.
◆ updateDynamicRadius()
|
inline |
Definition at line 96 of file contactsurfacebody.hpp.
◆ updateInternals()
|
inline |
Definition at line 43 of file contactsurfacebody.hpp.
◆ updatePositionsAndOrientations()
|
inline |
uses
- Template Parameters
-
Integrator
- Parameters
-
dt
Definition at line 120 of file contactsurfacebody.hpp.
Friends And Related Function Documentation
◆ GenericConnectionBodyPlugin< Cell, ContactSurface >
|
friend |
Definition at line 1 of file contactsurfacebody.hpp.
Member Data Documentation
◆ angularVelocity
Definition at line 7 of file orientable.h.
◆ cell
|
private |
Definition at line 19 of file contactsurfacebody.hpp.
◆ cellConnections
|
private |
Definition at line 20 of file contactsurfacebody.hpp.
◆ currentArea
|
private |
Definition at line 31 of file contactsurfacebody.hpp.
◆ currentVolume
|
private |
Definition at line 33 of file contactsurfacebody.hpp.
◆ dynamicRadius
|
private |
radiius of the cell when at rest
Definition at line 28 of file contactsurfacebody.hpp.
◆ force
◆ incompressibility
|
private |
Definition at line 23 of file contactsurfacebody.hpp.
◆ mass
|
protectedinherited |
◆ MAX_DYN_RADIUS_RATIO
|
staticconstexprprivate |
Definition at line 30 of file contactsurfacebody.hpp.
◆ membraneStiffness
|
private |
Definition at line 24 of file contactsurfacebody.hpp.
◆ movementEnabled
|
protectedinherited |
◆ orientation
Definition at line 9 of file orientable.h.
◆ orientationRotation
Definition at line 10 of file orientable.h.
◆ position
◆ pressure
|
private |
Definition at line 34 of file contactsurfacebody.hpp.
◆ prevDynamicRadius
|
private |
Definition at line 29 of file contactsurfacebody.hpp.
◆ prevposition
◆ restRadius
|
private |
Definition at line 26 of file contactsurfacebody.hpp.
◆ restVolume
|
private |
Definition at line 32 of file contactsurfacebody.hpp.
◆ torque
Definition at line 8 of file orientable.h.
◆ totalForce
|
protectedinherited |
◆ velocity
◆ volumeConservationEnabled
|
private |
Definition at line 35 of file contactsurfacebody.hpp.
The documentation for this class was generated from the following file:
- external/MecaCell/mecacell/contactsurfacebody.hpp